3.1 Representación de objetos en tres dimensiones
El diseño ayudado por ordenador representa un gran ahorro de esfuerzo y tiempo. Además se consiguen resultados extraordinarios con respecto a los procedimientos clásicos de diseño. Los programas de diseño industrial o arquitectónico admiten tres maneras de representación de objetos.
- Modelos bidimensionales del objeto o parte de él. Se reproducen separadamente las diferentes caras, planos o cortes para ser estudiados y modificados. Normalmente se utiliza una representación formal del objeto, obteniendo sus vistas desde diferentes puntos de visualización. Se denominan vistas principales de un objeto, a las proyecciones ortogonales del mismo sobre 6 planos, dispuestos en forma de cubo. También se podría definir las vistas como, las proyecciones ortogonales de un objeto, según las distintas direcciones desde donde se mire. Si situamos un observador según las seis direcciones indicadas por las flechas, obtendríamos las seis vistas posibles de un objeto.
- Modelos tridimensionales que incluyan únicamente un conjunto de puntos y líneas en el espacio. Estos modelos se llaman “wireframe” o alambrado (armazón de alambre). El objeto así representado rota en diferentes ángulos para su estudio o transformación definitiva. Existen varias formas de representación en modo wireframe:
- 1. Representación alambrica: Activa este modo de sombreado.
- 2. Representación alambrica det: Se muestran bordes alámbricos e iluminación
- 3. Área de trabajo: Muestra los objetos como área de trabajo solamente. El área de trabajo se define como la caja más pequeña que abarca completamente un objeto.
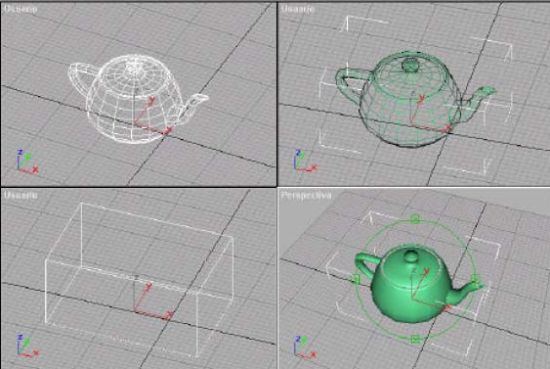
- Modelos sólidos que incluyen el dibujo de superficies y son los más completos y complejos.
- 1. Suavizado + Resaltes: Activa este modo de sombreado, que permite ver la homogeneidad e iluminación de los objetos. También puede presentar mapas en la superficie de objetos. Esto sucede mapa a mapa, pero puede presentar tantos mapas como desee simultáneamente en el visor. Los mapas sólo aparecen en objetos que tienen coordenadas de mapeado.
- 2. Suavizado: Muestra suavizado, pero no resaltes
Espacio tridimensional
El espacio 3D es un espacio matemático virtual creado por el programa de diseño 3D. Este espacio está definido por un sistema cartesiano de tres ejes: X, Y, Z. El punto donde salen las líneas virtuales que definen los ejes se llama origen y sus coordenadas son (0, 0, 0). En este espacio virtual se crean, modifican y disponen los diferentes objetos tridimensionales que van a componer la escena.

Fundamentos básicos del modelado en 3D
El 3D es una mera representación de coordenadas, que conforman estructuras envueltas por una textura.
Por tanto, primero se deben construir un modelo, para ello hay técnicas de modelado comunes, en las cuales se encuentran:
- 1. Estructuras Predefinidas: Aquellas estructuras ya armadas por el sistema. Existen tres tipos:
- Primitivas: caja, cono, esfera, geo esfera, cilindro, tubo, anillo, pirámide, tetera y plano.
- Primitivas Extendidas: hedra, nudo toroide, caja "redondeada", cilindro "redondeado", tanque de aceite, capsula, sprindle, forma L, gengon, forma c, anillo ondulado, hose, prisma.
- Librerías: son formas armadas, disponibles en 3d Max 7; puertas, ventanas, árboles, escaleras.
- 2. Box Modeling: Como su nombre lo indica, es el modelado de figuras complejas a través de una caja. Empleando un modificador de mallas, Edith Mesh, podrán ir extendiendo la caja, convirtiéndola en otra cosa.
- 3. NURBS Modeling: Es una técnica para construir mallas de alta complejidad, de aspecto orgánico ó curvado, que emplea como punto de partida splines (figuras 2d) para mediante diversos métodos, crear la malla 3d anidando los splines.
Renderizado
El renderizado es un proceso de cálculo complejo desarrollado por un ordenador destinado a generar una imagen 2D a partir de una escena 3D. Así podría decirse que en el proceso de renderización, la computadora "interpreta" la escena 3D y la plasma en una imagen 2D.
La renderización se aplica a los gráficos por ordenador, más comúnmente a la infografía. En infografía este proceso se desarrolla con el fin de imitar un espacio 3D formado por estructuras poligonales, comportamiento de luces, texturas, materiales, animación, simulando ambientes y estructuras físicas verosímiles, etc. Una de la partes más importantes de los programas dedicados a la infografía son los motores de render los cuales son capaces de realizar técnicas complejas como radiosidad, raytrace (trazador de rayos), canal alpha, reflexión, refracción, iluminación global, etc.
Cuando se trabaja en un programa de diseño 3D por computadora, no es
posible visualizar en tiempo real el acabado final deseado de una escena 3D compleja ya que esto requiere una potencia de cálculo demasiado elevada. Por lo que se opta por crear el entorno 3D con una forma de visualización más simple y técnica y luego generar el lento proceso de renderización para conseguir los esultados finales deseados.
Proyecciones
En dos dimensiones, las operaciones de visión transfieren puntos bidimensionales en el plano coordenado mundial a puntos bidimensionales en el plano de coordenadas del dispositivo. Las definiciones de objetos, sujetados contra el marco de una ventana, se delinean en un puerto de visión (viewport). Estas coordenadas de dispositivo normalizadas se convierten después en coordenadas de dispositivo y el objeto se despliega en el dispositivo de salida.
En tres dimensiones, la situación es un poco más complicada, ya que ahora tenemos algunas alternativas como la forma en que se van a generar las vistas. Podríamos visualizar una escena desde el frente, desde arriba o bien desde atrás. También podríamos generar una vista de lo que observaríamos si estuviéramos parados en medio de un grupo de objetos. Además, las descripciones tridimensionales de objetos deben proyectarse en la superficie de visión plana del dispositivo de salida.
La visualización en nuestro caso significa información del mundo real en la pantalla. La visualización 2D son las operaciones de transferencia de puntos bidimensionales en el plano coordenado del mundo en el plano coordenado del dispositivo.
Existen dos métodos básicos para proyectar objetos tridimensionales sobre una superficie de visión bidimensional. Estas dos maneras, dependen de si todos los puntos del objeto pueden proyectarse sobre la superficie a lo largo de líneas paralelas o bien los puntos pueden proyectarse a lo largo de líneas que convergen a una posición denominada centro de proyección. En ambos casos, la intersección de una línea de proyección con la superficie de visión determina las coordenadas del punto proyectado sobre este plano de proyección.
 |


Comentarios
Publicar un comentario